














A word from the student:
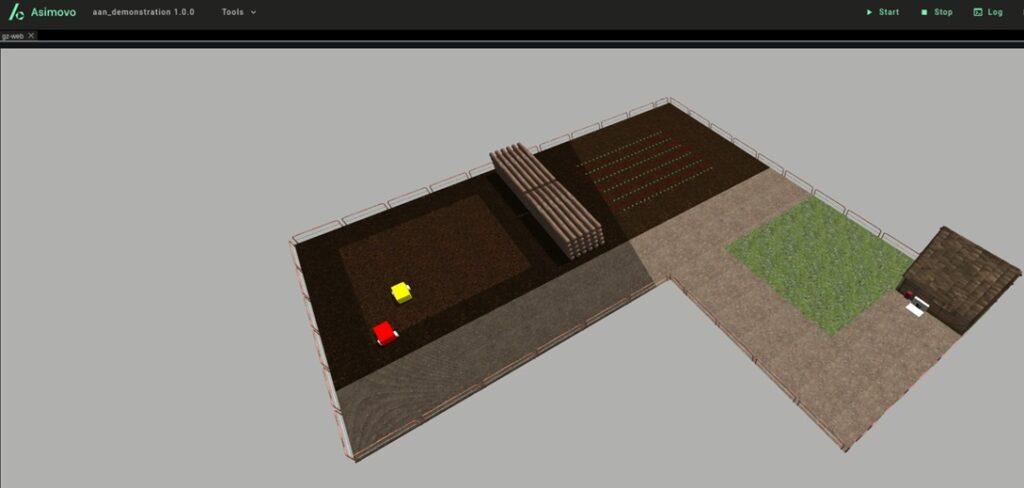
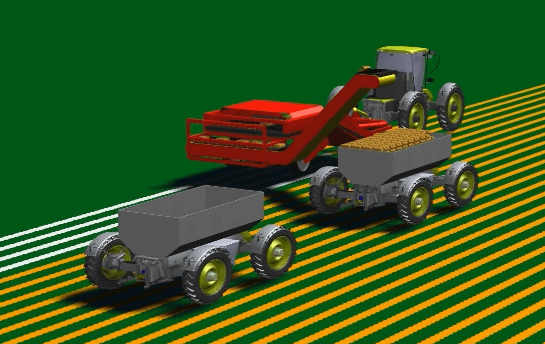
“During the minor Mobile Robotics, a few elective projects were presented to students following the Minor Mobile robotics. Our project group had chosen for the durable CASE project from H2Trac. The project goal was to design an autonomous driving vehicle that mimics the capabilities and preferably the looks of the H2Trac tractor, the EOX-175. This design can be used to build multiple scaled models and test cooperative algorithms. The vehicle will also be used in demos to show the use cases of the real EOX-175. A demo for such a use case is a primary EOX-175 driving a harvester and a secondary EOX-175 driving autonomously next to the harvester with a collector bin.
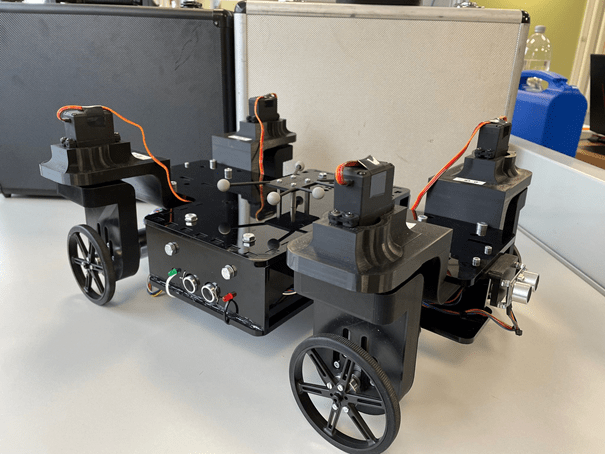
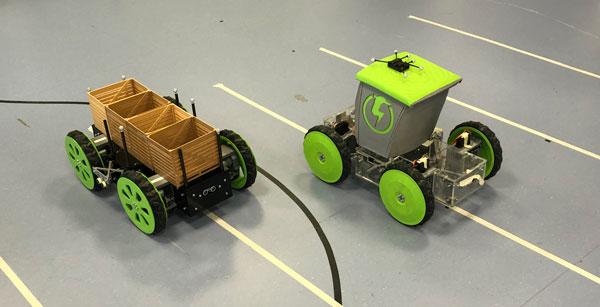
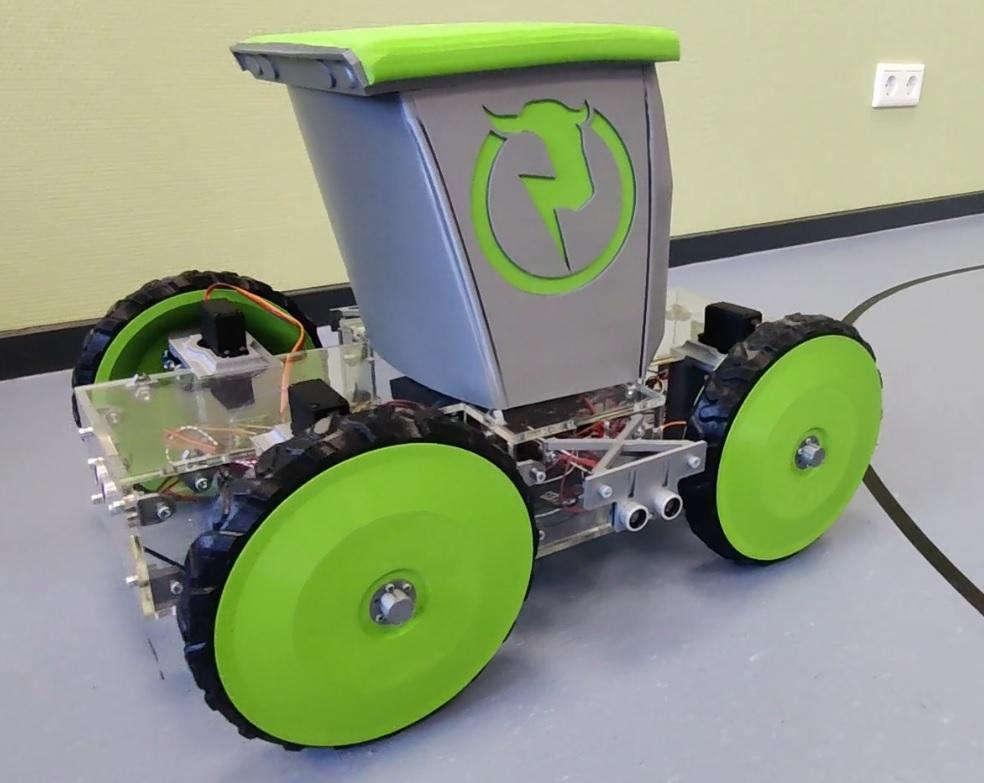
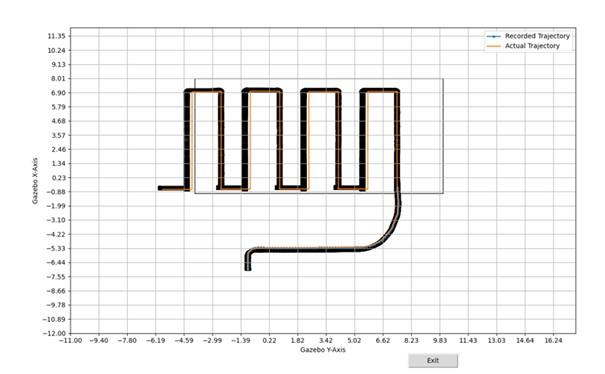
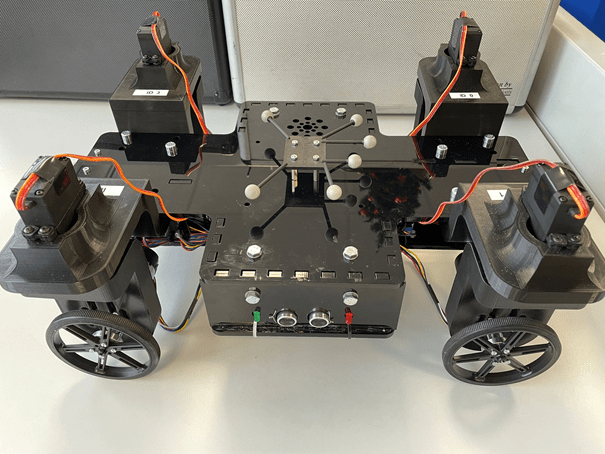
The project started from scratch with the design of the scaled model. The scaled model has four-wheel drive and steering (45˚), proximity sensors, wireless communication and an indoor localization interface via Optitrack. The software runs on a Nvidia Jetson and ROS2 is used to ensure the platform is future proof. The project team managed to build a prototype and developed both the low-level (PID controller for steering and speed) and the high-level software. The scale model is also able to drive to coordinates and can communicate with other identical vehicles (currently uses our own cooperative controller and path planning implementation, this will later be replaced by controllers that are developed by the durableCASE project).
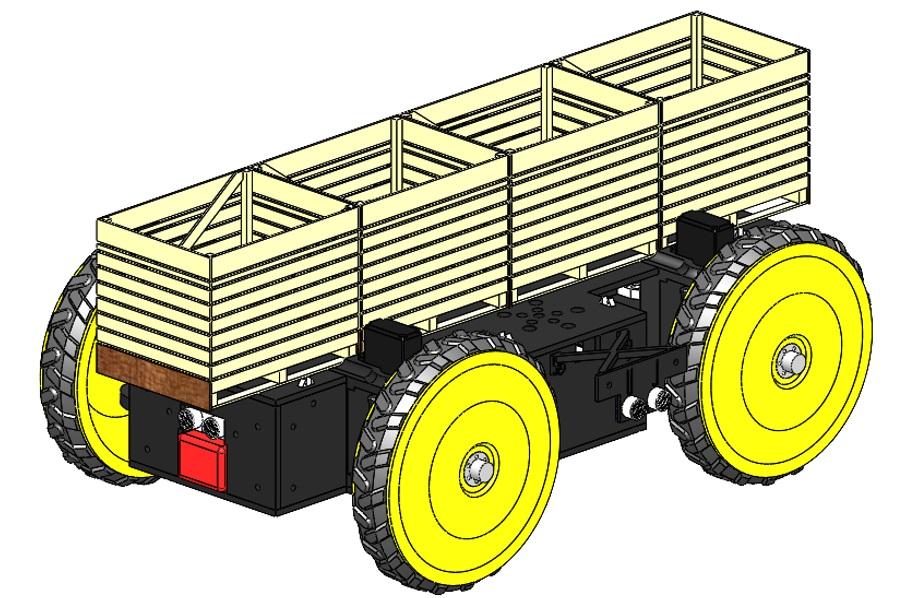
As shown in the figures the body of the model is an almost complete physical copy of the EOX-175 (1:10 scale). However the wheel assembly currently doesn’t look a lot like the real life tractor. Hence one of the main take-aways from this project is that some of the electronics don’t scale very well. Consequently, it is very challenging to make the scaled model look like its full scale counterpart. However, apart from the visual aspect, one can still conclude that the physical abilities of the model are a direct scaled down copy of the EOX-175 tractor.
Hopefully future project teams will be able to use our work to improve the design since the scaled model is fully modular and further develop the cooperative driving algorithms.”

 Op de begane grond wordt er nog druk verbouwd, maar de etages daarboven zijn vrijwel geheel in gebruik genomen. Het gebouw biedt vanaf cursusjaar 2021-2022 onderdak voor de gecombineerde opleidingen van Academie Engineering en Automotive (HAN AEA). Op de tweede etage bevindt zich labruimte slimme voertuigen (ruimte H2.04). Naast de labs op de begane grond hebben we daarmee een ruimte voor opstellingen met voertuigen op schaal. De DurableCASE labtests zullen dan ook in deze ruimte gaan plaatsvinden. De ruimte krijgt ook waardevolle instrumentatie, zoals een bewaking en bediening op afstand (via het DurableCASE-Impuls project – zie het betreffende nieuwsbericht) en een Optitrack systeem dat met hoge frequentie en nauwkeurigheid positie en oriëntatie van rijdende (of vliegende) robots kan meten.
Op de begane grond wordt er nog druk verbouwd, maar de etages daarboven zijn vrijwel geheel in gebruik genomen. Het gebouw biedt vanaf cursusjaar 2021-2022 onderdak voor de gecombineerde opleidingen van Academie Engineering en Automotive (HAN AEA). Op de tweede etage bevindt zich labruimte slimme voertuigen (ruimte H2.04). Naast de labs op de begane grond hebben we daarmee een ruimte voor opstellingen met voertuigen op schaal. De DurableCASE labtests zullen dan ook in deze ruimte gaan plaatsvinden. De ruimte krijgt ook waardevolle instrumentatie, zoals een bewaking en bediening op afstand (via het DurableCASE-Impuls project – zie het betreffende nieuwsbericht) en een Optitrack systeem dat met hoge frequentie en nauwkeurigheid positie en oriëntatie van rijdende (of vliegende) robots kan meten.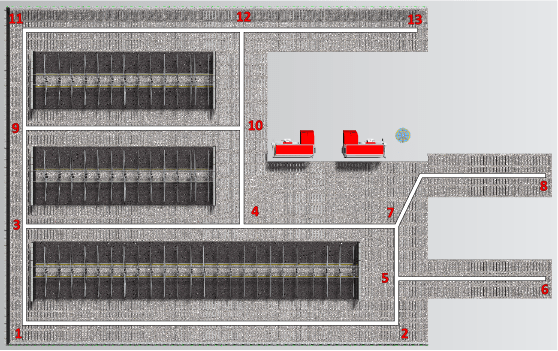
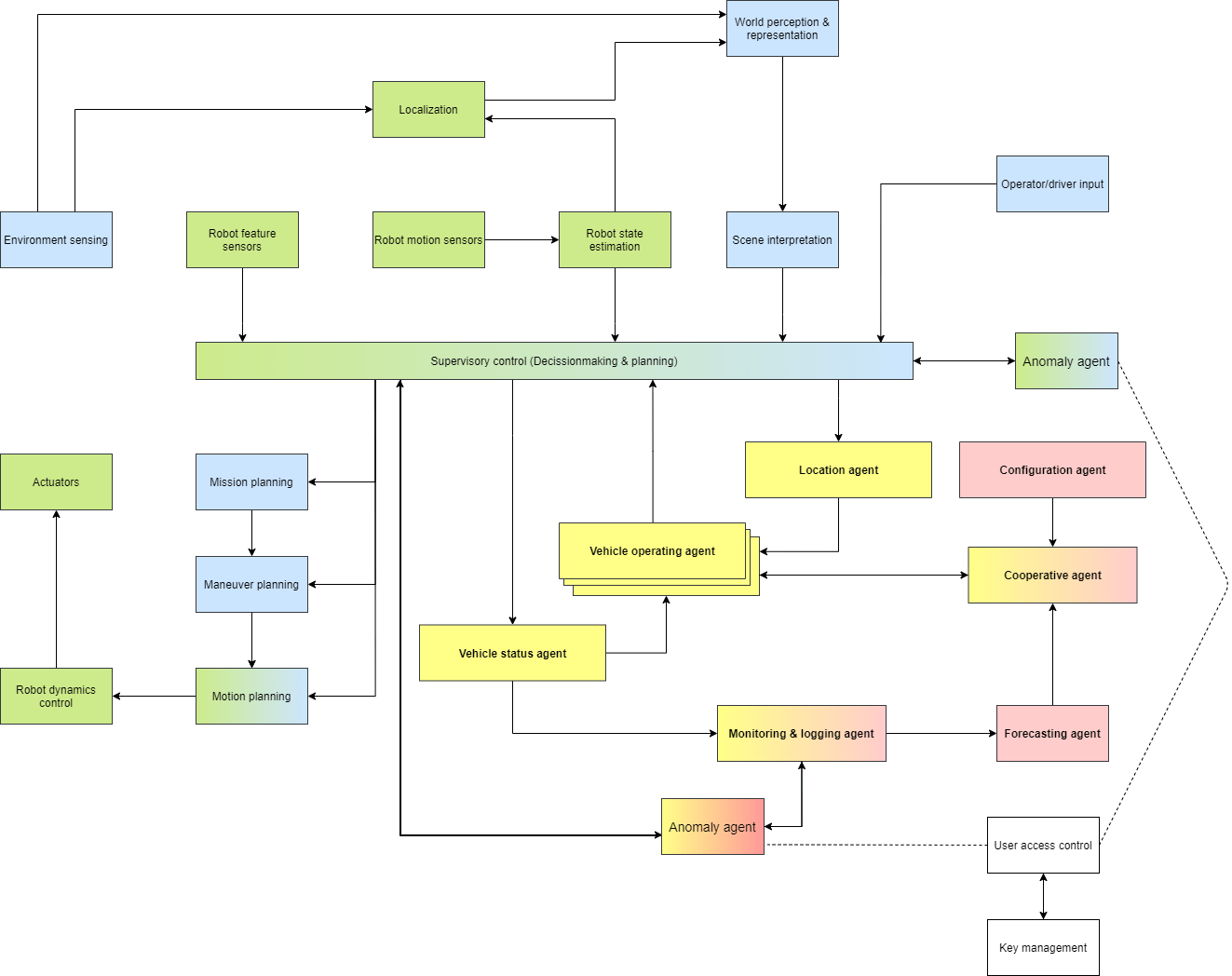
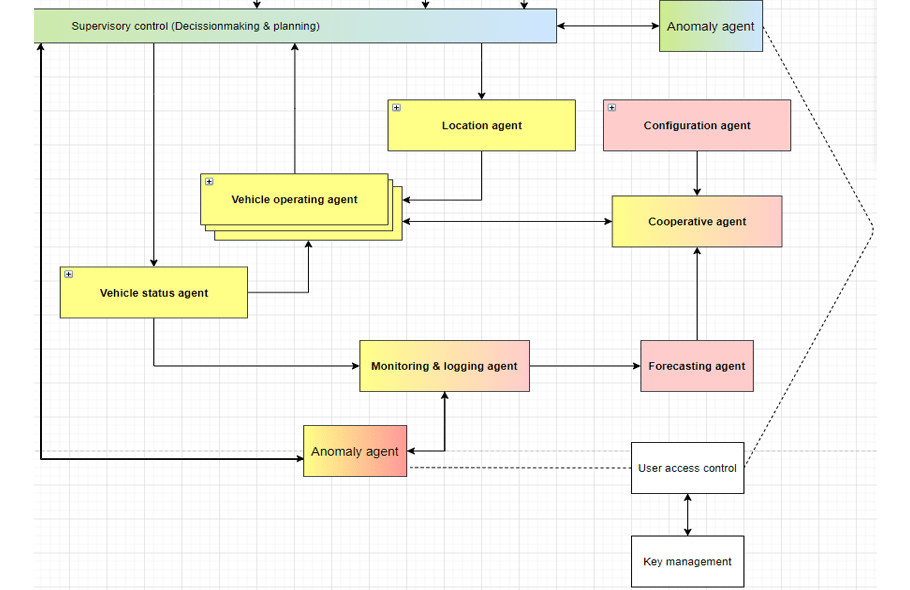
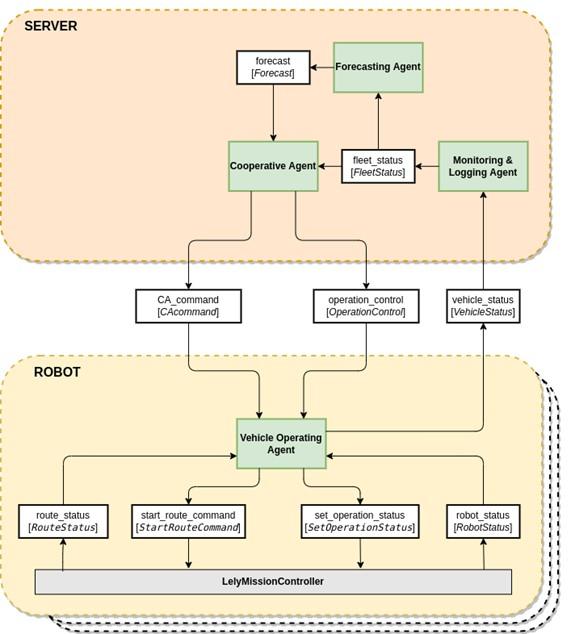
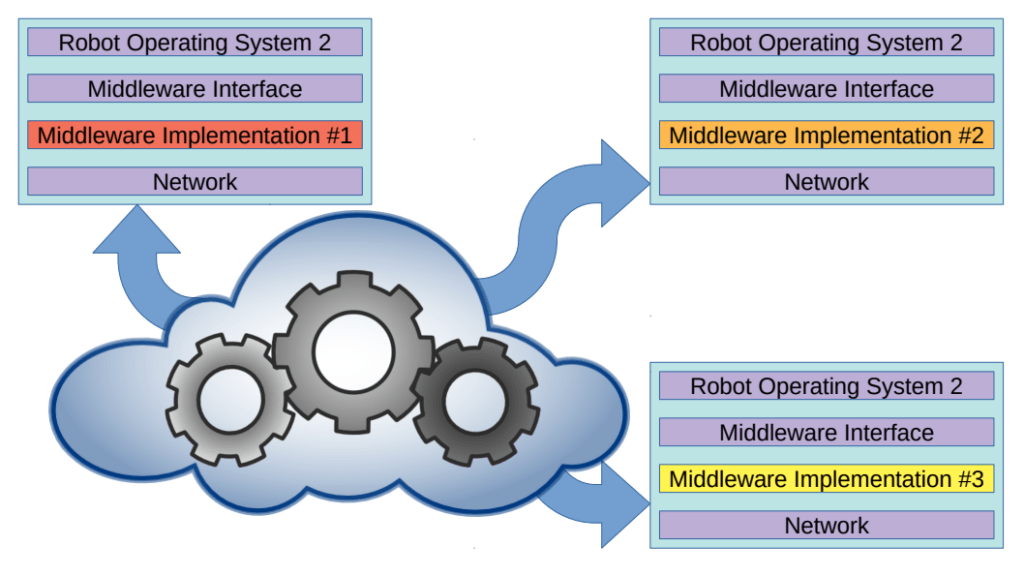
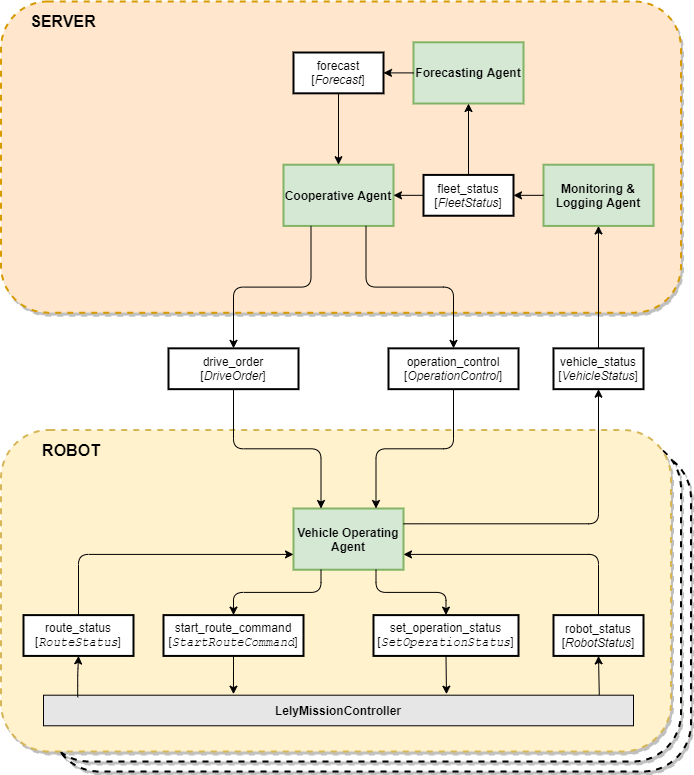
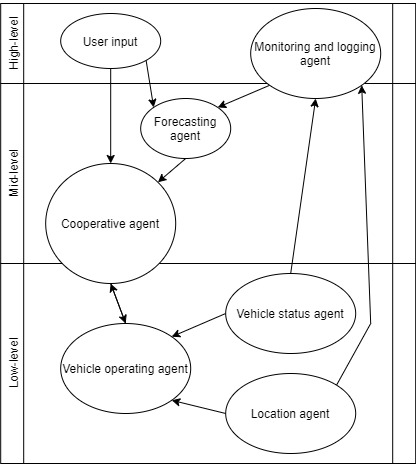 Distribute heeft een Multi-Agent System (MAS) ontworpen voor dit project. Een MAS is een (semi-)zelf organiserend systeem, bestaande uit verschillende stukjes software, zogeheten agents worden genoemd. Elk van deze agents is verantwoordelijk voor een bepaalde taak en kan beslissingen op zich zelf maken om hun eigen doelen na te streven. Door samen te werken met andere agents, kunnen ze gezamenlijke doelen behalen op een doorgaans efficiëntere en robuustere manier dan wanneer één centraal software-systeem dit op zich neemt.
Distribute heeft een Multi-Agent System (MAS) ontworpen voor dit project. Een MAS is een (semi-)zelf organiserend systeem, bestaande uit verschillende stukjes software, zogeheten agents worden genoemd. Elk van deze agents is verantwoordelijk voor een bepaalde taak en kan beslissingen op zich zelf maken om hun eigen doelen na te streven. Door samen te werken met andere agents, kunnen ze gezamenlijke doelen behalen op een doorgaans efficiëntere en robuustere manier dan wanneer één centraal software-systeem dit op zich neemt.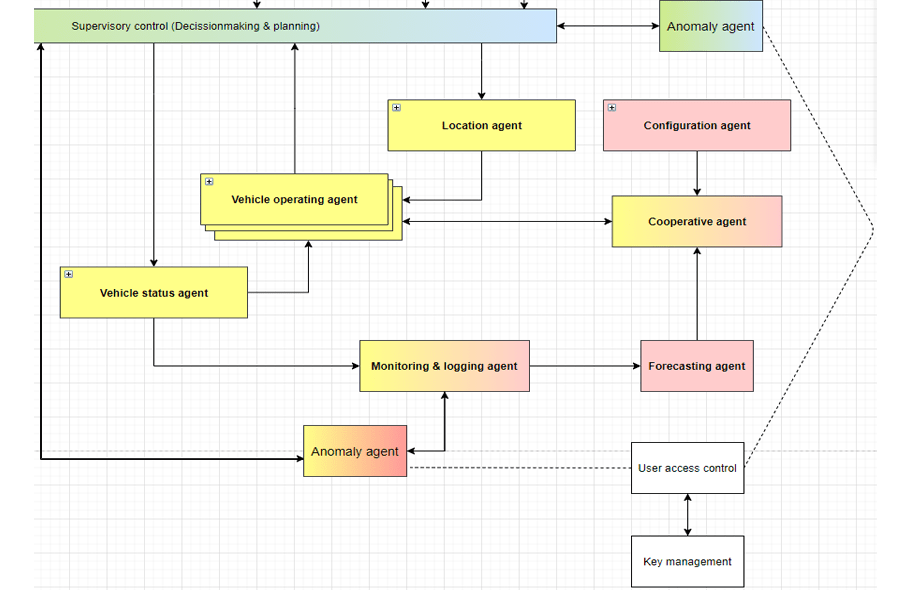
 Het project DurableCase (Durable Cooperative Agrobotics Systems Engineering), waarin HAN Automotive Research samenwerkt met andere kennisinstituten, hogescholen en het bedrijfsleven, richt zich op de ontwikkeling van deze volgzame kistenkarren.
Het project DurableCase (Durable Cooperative Agrobotics Systems Engineering), waarin HAN Automotive Research samenwerkt met andere kennisinstituten, hogescholen en het bedrijfsleven, richt zich op de ontwikkeling van deze volgzame kistenkarren.